engineering & technology publications
ISSN 1759-3433
PROCEEDINGS OF THE EIGHTH INTERNATIONAL CONFERENCE ON COMPUTATIONAL STRUCTURES TECHNOLOGY
Semi-active Vibration Isolator Based on Elastomer Material Controlled by an SMA actuator
VTT Technical Research Centre of Finland, Finland
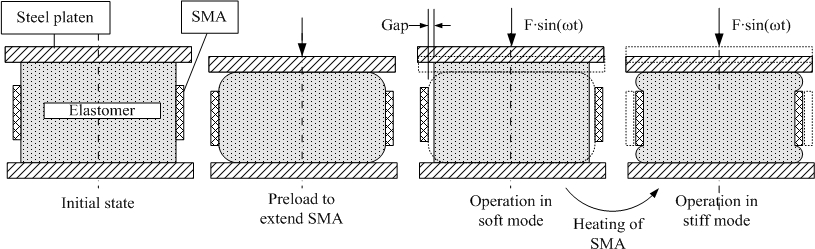
The same idea to change the boundary condition of the device to adjust its stiffness was applied for an axial spring made of elastomer material. While a cylindrical block of the elastomer is compressed, it expands in the direction perpendicular to the load. Restricting the expansion, the axial stiffness in the loading direction becomes higher. A circular support ring made of SMA was used as an actuator. It was attached to the outside of the cylindrical elastomer spring. The change of boundary condition was controlled by the gap between the elastomer spring and constraint as shown in Figure 1. The operation mode, stiff or soft, was selected by controlling the temperature of the SMA-actuator which controls the phase composition of the SMA.
The stiffness region that can be controlled was determined both by analytical and numerical analysis. The stiffness ratio depends on the geometric shape of the spring (shape factor D/4h) and the ratio between the confined area in the stiff mode and the area where the material can expand freely in the soft mode. For the cylindrical shape of the elastomer, diameter 48mm and height 30mm, and the SMA support ring, height 20mm and thickness 1mm, stiffness ratio 8.8 can be achieved.
Numerical finite element simulations were undertaken to verify the stiffness ratio and to validate the geometric design and the feasibility of the construction. A non-linear contact analysis was applied with a hyperelastic material for the elastomer and a simplified model, elastic-plastic material model with strain hardening, for the SMA. Due to one-way shape memory, external work is required to return from stiff to soft mode. The amount of work depends on the stiffness of the SMA constraint. To avoid the large compression resulting in large local deformations in the elastomer, the elastic modulus of elastomer needs to be in a correct relationship in comparison to the SMA constraint.
|
Experimental studies were carried out uding an Instron 8502 loading machine to verify the feasibility of the semi-active device. PUR-elastomer was chosen as a base material. The grade of PUR-elastomer was chosen such that the stiffness does not change significantly in the temperature control region (20oC-70oC). The temperature control of SMA constraint was applied by an external air blow system in which the air temperature and flow was controlled. The control system was rapid to heat up the SMA from soft to stiff control. Due to relatively large heat capacity of the isolator and surrounding parts, the cooling needed much more time. Therefore, returning back from stiff to soft was much slower.
Experimental tests indicated promising results of the controllable stiffness region in the low frequency test (0.5 Hz). The change of boundary condition by controlling the temperature of SMA-actuator can be utilized to control the stiffness although the stiffness ratio of 4.5 was not as high as expected according to the analysis (up to 8.8). Further studies are planned to improve the controllable stiffness region by experiments.
- 1
- J. Heinonen, I. Vessonen, P. Klinge and E. Järvinen, "Controlling Stiffness of a Frame Spring by Changing the Boundary Condition", II Eccomas Thematic Conference on Smart Structures and Materials, C.A. Mota Soares et al. (Eds.), Lisbon, Portugal, July 18-21, 2005
purchase the full-text of this paper (price £20)
go to the previous paper
go to the next paper
return to the table of contents
return to the book description
purchase this book (price £140 +P&P)