engineering & technology publications
ISSN 1759-3433
PROCEEDINGS OF THE TENTH INTERNATIONAL CONFERENCE ON CIVIL, STRUCTURAL AND ENVIRONMENTAL ENGINEERING COMPUTING
Modelling and Design of Variable Friction Dampers for Improving Seismic Response of Structures
Department of Civil Engineering, College of Judea and Samaria, Ariel, Israel
A new passive variable friction damper is proposed in this paper. Its principal distinction from other existing ones is using a wedge-form part, aimed to change the friction force as a function of the displacement transferred to the damper. An additional advantage of the proposed damper is a possibility to design it so, that the centring capacity would be provided.
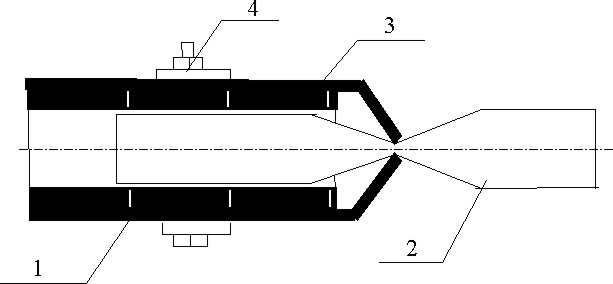
The proposed damper, shown in Figure 209.1 consists of a square section tube (1), a wedge (2), two elastic strip elements (3) and a bolted connection clip (4). The wedge is located partially inside the tube and can move back and forward along its axis. The strips have a cantilever static scheme and are fixed on the tube by the connection clip, forming an elastic strip system. The stiffness of this system may be regulated by changing the location of the connection clip along the tube. The free ends of the cantilever strips have a contact with an inclined surface of the wedge.
The damper's mechanical properties and its hysteretic behavior were studied theoretically and verified experimentally using a small-scale model and a laboratory shaking table. A static scheme was assumed, which enables to obtain the force-displacement relationship of the damper. It was shown that the relationship depends on the flexibility coefficients of the strip elements, which were calculated and also obtained experimentally.
|
The displacements and the damping forces were measured using analogue sensors with an output to a PC through a data logger. The displacements and the forces records were received by cyclic moving of the wedge, using the shaking table. Using these records, the hysteretic behavior of the damper was further obtained.
The results of the dynamic test are in good correlation with the proposed theoretical model. It was demonstrated that the loading and unloading lines of the damper's hysteretic loops are linear and have similar slopes as the calculated ones. Hence, the theoretical model, proposed in this study, can be successfully used for design of full-scale variable friction dampers for real structures.
- 1
- I. Iskhakov, "Seismic energy dissipation and ductility of RC elements section", Fifth national conference on earthquake engineering, paper No. AE-025, Istanbul, May 26-30, 2003.
- 2
- Y. Ribakov and J. Gluck, "Active Controlled Friction Damped MDOF Structure with Variable Stiffness", Eighth Canadian Conference on Earthquake Engineering, Vancouver, Canada, 409-414, 1999.
purchase the full-text of this paper (price £20)
go to the previous paper
go to the next paper
return to the table of contents
return to the book description
purchase this book (price £135 +P&P)